




Лазераналіз та обробка сигналів дистанційного виявлення мовлення
Декодування сигнального шуму: аналіз сигналів та обробка лазерного дистанційного виявлення мовлення
У дивовижній сфері технологій лазерне дистанційне розпізнавання мовлення подібне до прекрасної симфонії, але ця симфонія також має свій власний «шум» – сигнальний шум. Як і несподівано галаслива аудиторія на концерті, шум часто заважаєлазерне розпізнавання мовленняЗгідно з джерелом, шум лазерного дистанційного виявлення мовленнєвих сигналів можна грубо розділити на шум, що створюється самим лазерним приладом для вимірювання вібрації, шум, що створюється іншими джерелами звуку поблизу об'єкта вимірювання вібрації, та шум, що генерується перешкодами навколишнього середовища. Виявлення мовлення на великій відстані зрештою потребує отримання мовленнєвих сигналів, які можуть бути розпізнані людським слухом або машинами, і багато змішаних шумів із зовнішнього середовища та системи виявлення зменшують чутність та розбірливість отриманих мовленнєвих сигналів, а розподіл частотної смуги цих шумів частково збігається з розподілом основної частотної смуги мовленнєвого сигналу (близько 300~3000 Гц). Його не можна просто відфільтрувати традиційними фільтрами, і потрібна подальша обробка виявлених мовленнєвих сигналів. Наразі дослідники в основному вивчають шумозаглушення нестаціонарного широкосмугового шуму та ударного шуму.
Широкосмуговий фоновий шум зазвичай обробляється методом короткочасної оцінки спектру, методом підпростору та іншими алгоритмами придушення шуму на основі обробки сигналів, а також традиційними методами машинного навчання, методами глибокого навчання та іншими технологіями покращення мовлення для відділення чистих мовних сигналів від фонового шуму.
Імпульсний шум – це спекл-шум, який може виникати внаслідок динамічного спекл-ефекту, коли розташування об'єкта виявлення порушується світлом виявлення системи виявлення LDV. Наразі цей тип шуму в основному усувається шляхом виявлення місця, де сигнал має пік високої енергії, та заміни його прогнозованим значенням.
Лазерне дистанційне виявлення голосу має перспективи застосування в багатьох галузях, таких як перехоплення, багаторежимний моніторинг, виявлення вторгнень, пошуково-рятувальні роботи, лазерний мікрофон тощо. Можна передбачити, що майбутня тенденція досліджень лазерного дистанційного виявлення голосу буде головним чином базуватися на (1) покращенні вимірювальних характеристик системи, таких як чутливість та співвідношення сигнал/шум, оптимізації режиму виявлення, компонентів та структури системи виявлення; (2) підвищенні адаптивності алгоритмів обробки сигналів, щоб технологія лазерного виявлення мовлення могла адаптуватися до різних відстаней вимірювання, умов навколишнього середовища та цілей вимірювання вібрації; (3) більш розумному виборі цілей вимірювання вібрації та високочастотній компенсації мовних сигналів, виміряних на цілях з різними частотними характеристиками; (4) покращенні структури системи та подальшій оптимізації системи виявлення шляхом
мініатюризація, портативність та інтелектуальний процес виявлення.
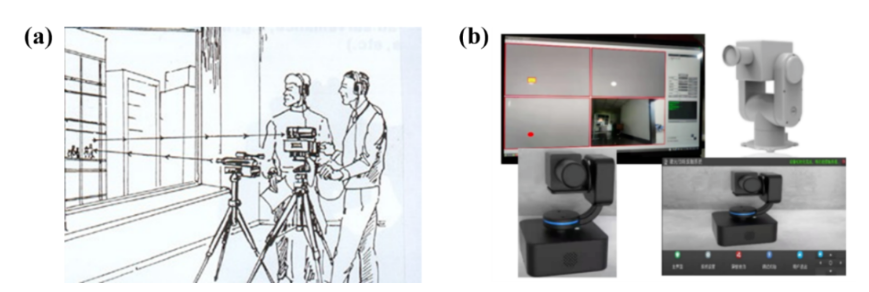
РИС. 1 (a) Принципова схема лазерного перехоплення; (b) Принципова схема системи лазерного протиперехоплення
Час публікації: 14 жовтня 2024 р.